Last weekend I did some tests with a UBLOX Neo6 GPS running next to the V2 camera to see if it’s better than the V1 camera.
The GPS had a clear view of half of the sky with a building to one side so not necessarily ideal conditions. The GPS was powered from the Pi with the cable wrapped through a small ferrite bead.
Here is a picture of the setup:

Here is the graph showing the Satelite number, PDOP, Position accuracy and velocity accuracy reported by the GPS:
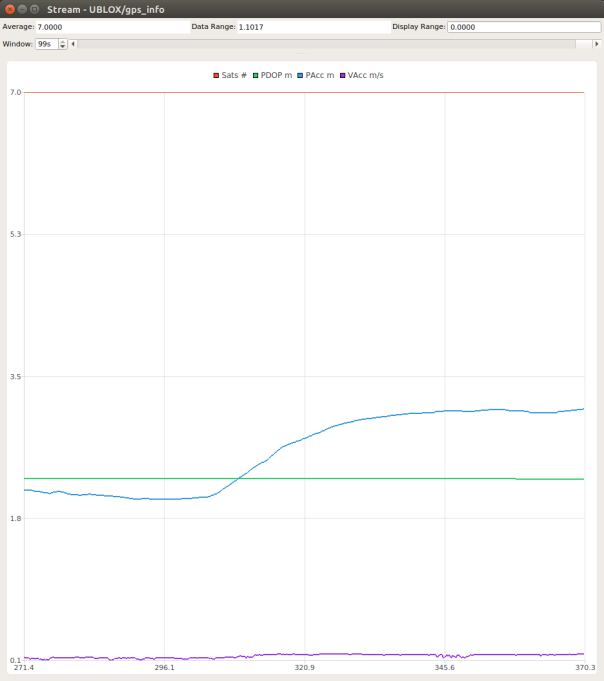
There is a clear jump when turning on the camera where PAcc goes from ~2 to ~3.2. With the V1 camera this jumped to 30-40.
The jamming indicator showed 15-20% regardless if the camera was off or on. With V1 the indicator jumped to 100% when turning the camera on.
The number of satellites is the same, as is the PDOP and VAcc.
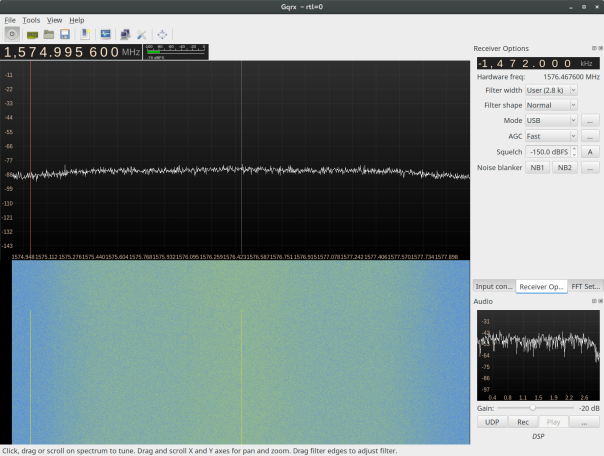
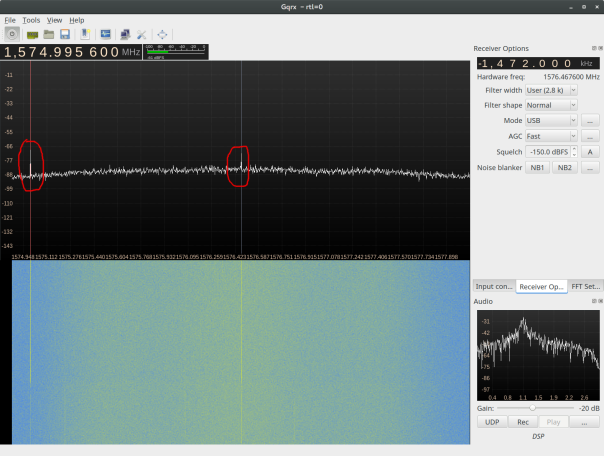
The spectrum measured with the SDR was crystal clear even when the antenna was almost touching the camera ribbon cable – which btw is unshielded.
So my conclusion is that the V2 interferes with the GPS way less than the V1 and with a bit of (optional) ribbon cable shielding it should be ok for a multirotor.